
在本文中,我们将讨论四连杆机构。四杆机构具有以下几个重要特征
1.四杆机构是所有闭环机构中最简单的一种形式。
2.将有一个固定连杆,3个移动连杆和4个销钉接头。
1.四杆机构是所有闭环机构中最简单的一种形式。
2.将有一个固定连杆,3个移动连杆和4个销钉接头。
客观的
对实际机构中的四杆机构进行了分析
等等讨论了我们一般在我们的工程生活中使用的四个条形机制的真实世界例,它是锁定钳子。
锁定钳是一种使用过中心机构和四杆机构使用户能够将钳子保持在锁定位置的钳子。
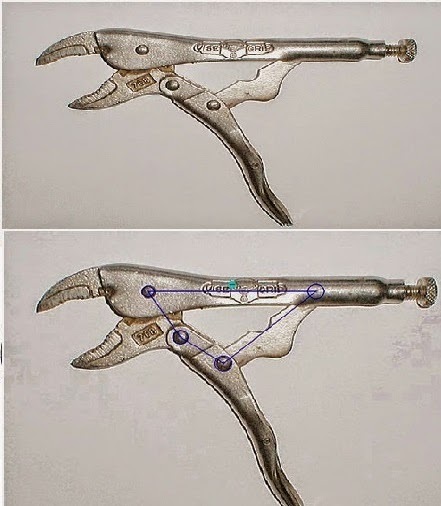
让我们考虑一下我们谈论的是哪四个杆,在下面的图中我们已经提到了它们的联系。
我们已经用我们车间的锁钳测量了连杆,为了便于理解,我们只是在下面标明了连杆。


有三个移动的连杆和一个固定的连杆,让我们来了解一下连杆
有三个移动的连杆和一个固定的连杆,让我们来了解一下连杆
DC表格一个链接,AD表格第二链接,AB表格第三链接和BC形式第四链路
如上所述,直流链路是固定的
AB = 80mm, BC= 55mm
AD= 35mm, DC= 25mm
我们已经固定了直流电连接,底部的直流电连接很容易固定,我们可以画出整个原因的瞬时中心的移动。
在此之前,我们必须了解瞬时的概念
中心和我们可以了解关于瞬时
中央考虑到下图。

为了计算瞬时的运动
中心,我们必须计算位移方程。
考虑如图所示的直角坐标系,可以确定四杆机构的位移方程。

对于A,对于B
X一个= -1因为ᶲXB=一个4——一个3.因为ψ
Y一个=一个1罪ᶲYB=一个3.罪ψ
A= Sinᶲ,B = (A4/一个1)+ cosp.
C = (4/一个3.)因为ᶲ+ {a12- 一个22+一个3.2+一个42} / (2 a1一个3.)
对于一个旋转,我正在计算和休息可以计算,我已经给出了上面的公式
对于ᶲ= 20度,根据上面的公式,右连杆将移动65.81度。
会有瞬时的限制也在改变角度和改变中心及其取决于机制例如如果我们看到钳机制当我们按一端然后将有一个中风和中风只有链接会改变它,角度和瞬时中心将被改变。
让我们在一张图中考虑不同的位置。
有两个基本的约束方程如下所述。


让我们根据“流体耦合"
还读:
你有什么建议吗?请在评论栏中填写

你能用几何分析来说明吗?
回复删除